
Airbus Sloshing Rocket Workshop
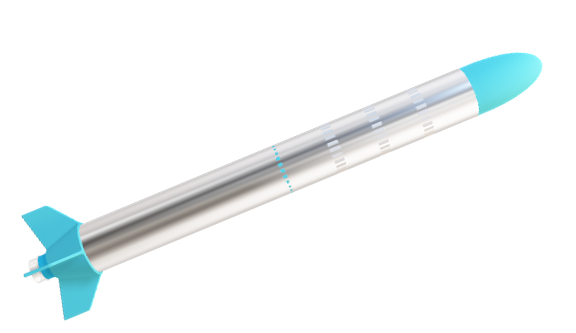
A water-propelled rocket designed to stay stable against a sloshing liquid payload — European champion.
Designing for Sloshing
A half-full, unpressurised water tank shifts the rocket's centre of mass mid-flight, destabilising it. The design had to manage those dynamic sloshing forces to maximise range, time of flight, and payload fraction.
The rules set hard limits: ≤ 5 kg take-off weight, launch pressure < 10 atm (147 psi), vehicle ≤ 1.5 m long, air/water propellant only, and a total cost ≤ €500 — with cost itself a scored metric.


Optimising the objective the score actually rewards
I built a Simulink water–air propulsion model that captured nozzle thrust and the in-flight liquid mass-shift simultaneously — the coupled effect most teams ignored.
Because the score rewards displacement-plus-time scaled by payload fraction — not thrust — optimising raw thrust is the wrong target. Modelling thrust and mass-shift together let us optimise the actual scored quantity, while higher-thrust-focused teams over-indexed on the wrong variable.

Collaboration with the
Local Authorities
Our team had cultivated a long-enduring collaboration with the local authorities of the region of Dirfies-Messapies, who provided the necessary space for rocket launch testing.

Tuning the water charge
With water volume as the free variable, specific work traces a clear optimum: a peak of 194 J/kg near an 890 ml charge of the 1780 ml tank. The operating point was set off this curve. A 3% difference from optimum water fillup was accepted.
Optimised design parameters
At a take-off weight of 2.03 kg, the sweep returned the dimensionless set σ, ρ, m and a payload ratio of π = 0.393 — the figure the competition score actually rewards.
The Winning Rocket Vector
During the 5-day Forlì build window, we manufactured the rocket and launch system using only the parts in our submitted Bill of Materials — no outside parts, no borrowing.
We had deliberately minimised spares to drive cost down — cost was scored — which left zero margin for error, a tradeoff that would matter on the final day.
We also designed a new, leaner launch frame with fewer structural components than our Greek rig — but did not field-test the new version before the final.


Sixty minutes, a brick, and a record
The failure. On the first of only two attempts — a storm had cut three to two — the rocket pitched to nearly 90° off vertical the instant it left the rod. Large fins recovered its heading, but the drag had already eaten the performance, and the frame nearly buckled with the rod still inside the rocket.
The diagnosis. I replayed the flight video. Thrust was nominal — the cause was the launch system. The new frame's ground tie-down wires had not been extended and staked, so the aluminium cross-frame wasn't pinned: under the launch reaction it jumped and flexed, swinging the rod and rocket sideways.
The constraints. Judges allowed no design change and no borrowing — field-available materials only — with a storm closing in and ~60 minutes to the final attempt.
The fix. I dug a brick out of the freshly plowed field, wedged it under the base of the vertical launch rod, and strapped the team's bench to the frame for mass and rigidity — improvising the ground anchoring the rig was missing, using only what the field provided.
The result. The second flight was clean and matched simulation — 57 m apogee, and the overall competition win.

The Launch System
For the purposes of rocket launches a cross-shaped platform was devised by the mechanical engineer of our team, with features like internal piping for the channeling of the air flow, a reliable locking mechanism and launch-rod straightening wires in tension.


Competition Committees
 14
14 15
15 16
16 17
17MathWorks Winner’s Circle
Our team was featured in the “Winner’s Circle” online blog of MathWorks, recognizing our distinction and the exceptional use of MATLAB/Simulink for the design and optimization of our water/air propulsion system.
Read the feature →
MathWorks — feature on the winning Simulink propulsion model. mathworks.com/academia →
EUROAVIA International — Airbus Sloshing Rocket Workshop 2025 results, Forlì, Italy. [VERIFY: link]
DeltaV Dynamics — Conceptual Design Report (PDF). [ASSET: PDF]
DeltaV Dynamics — Final Design Report, 8.6/10 (PDF). [ASSET: PDF]
